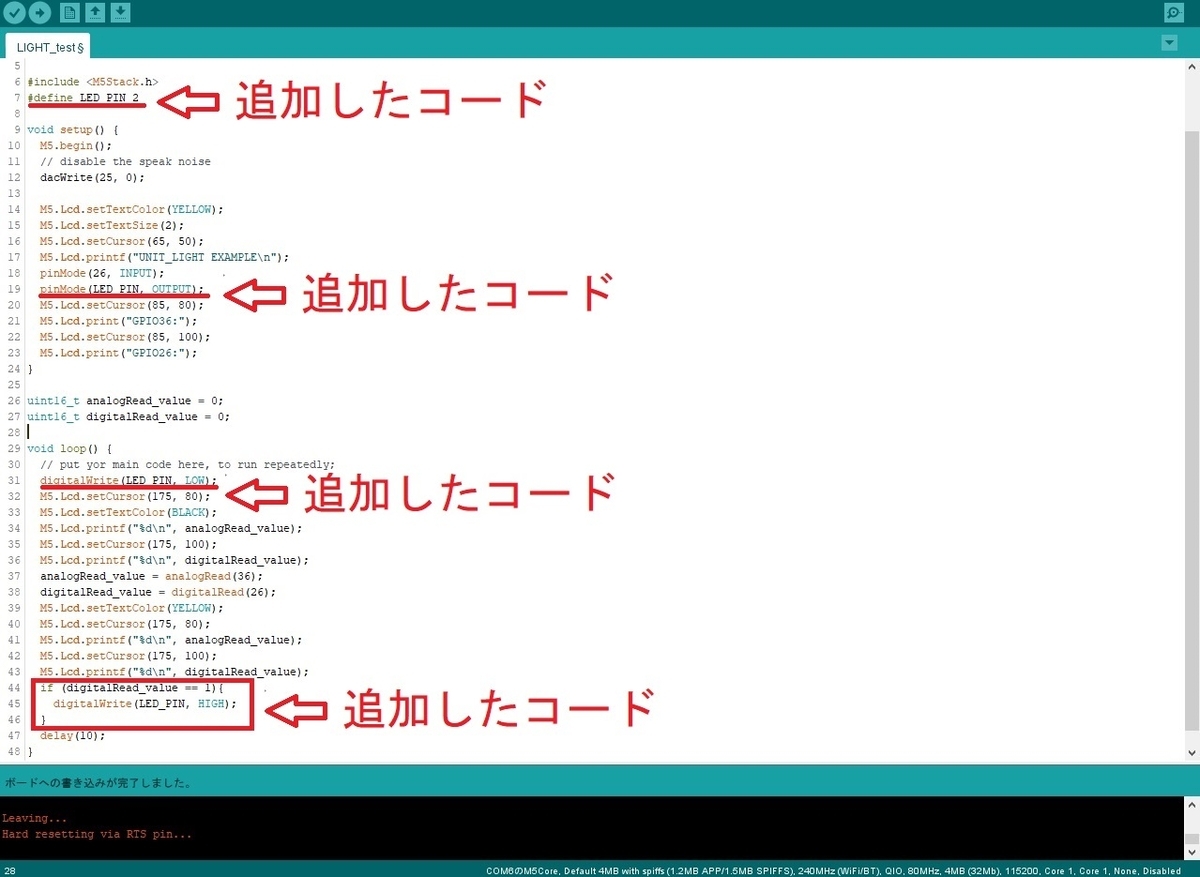
NCIR は非接触温度センサーです。後で紹介する GPS も結構高かったのですが、当時は仕事をしていたので積極的に購入しました。今だったら、高いので買えません。これは、Arduino のスケッチ例のプログラムで動作しました。かなり接近させないと、体温は測定できないようでした。設定の数値を変更すれば、病院で検温したりするような距離感で測定できると思われます。下の画像が、NCIR です。

次にとても苦労した、 GPS V2 (u-block 社 NEO-M8N チップ)です。とりあえずいつものように、スイッチサイエンスのサイトからプログラムを探しました。簡単な raw ファイルで試してみました。Arduino でコンパイルしましたが、緯度経度の情報が取得できません。何分待っても、下のように表示されます。

以前ラズベリーパイで GPS ロガーを作った時は、家の中でも緯度経度らしいデータが取得できていました。その思い込みが間違っていました。なんでか分からない沼にハマり込んでしまいました。その後はあれこれと Web サイトを探索し続けました。
これでも使えると紹介してあったので、GPS 単体を USB-TTL シリアルで配線しました。下の画像です。

そして、 u-center につないで使ってみました。下の画像です。NoFix です。
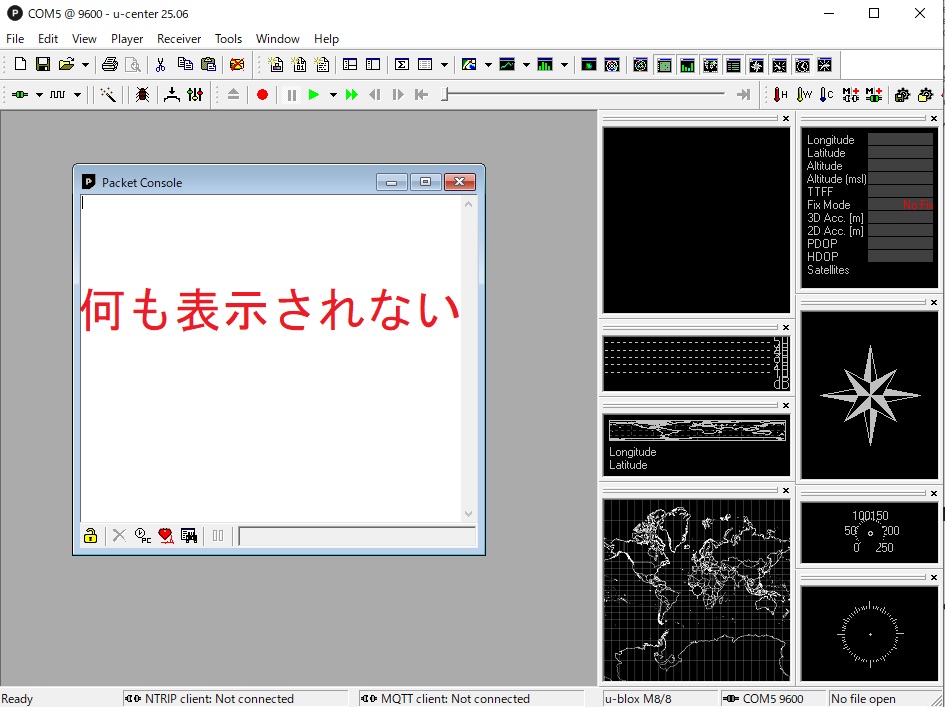
何も表示されません。TX(送信)と RX(受信)の接続間違いかも知れないと思い、入れ替えました。それでも何も表示されません。それからも高価な GPS ですから、あきらめきれずジタバタしてました。あきらめる前に、また Copilot に聞いてみることにしました。先の GPS raw のプログラムに戻して、動作の様子をコピーして聞いてみました。そうしたら、次のような回答が得られました。
「取得できているNMEA文 $GNRMC,,V... や $GNGGA,,,,,,0,00... は「衛星をまだ捕捉していない」状態を示しています。つまりモジュール自体は動作しているが、位置情報が得られていないだけです。」そこで、緯度経度を表示するようなプログラムの作成を依頼しました。それが、下のプログラムです。

Copilot から必ず外で測定するように言われていたので、外で数分観測しました。そうしたら、緯度経度が表示されました。グーグルアースで表示される緯度経度とほぼ一致しました。下の画像です。

以前から持っていた先入観が、なんでか分からない沼にハマる原因になっていました。外で観測する、という単純なことで解決しました。それではフルバージョンではどうかと思い、試してみました。これも数分待つと、今度はちゃんと緯度経度も表示されました。下が、フルバージョンのプログラムです。
次の目標ですが、前にラズパイで GPS ロガーを作りました。今回も、M5Stack で GPS ロガーを作りたいと思っています。よりコンパクトになります。完成させることができたら、この NEO_M8N は QZSS 準天頂衛星も捕捉しますので精度も良くなると思います。次回の記事にできるように頑張りたいと思います。