## Bug report - Operating System: Ubuntu 20.04 - ROS2 Version: Foxy binaries - Version or commit hash: https://github.com/ros-planning/navigation2/commit/f28951048dc67f1e8a7b1b7cf450195e53a80ee6 - DDS implementation: Fast-RTPS #### Steps to reproduce issue 1. ./Groot (implies cmake build as per https://github.com/BehaviorTree/Groot/blob/fae38066a61068c966eefd4c825738bb650413cc/README.md) 2. Load pallet: https://github.com/ros-planning/navigation2/blob/f28951048dc67f1e8a7b1b7cf450195e53a80ee6/nav2_behavior_tree/nav2_tree_nodes.xml 3. load tree: https://github.com/ros-planning/navigation2/blob/f28951048dc67f1e8a7b1b7cf450195e53a80ee6/nav2_bt_navigator/behavior_trees/navigate_through_poses_w_replanning_and_recovery.xml #### Expected behavior The tree loads in groot #### Actual behavior 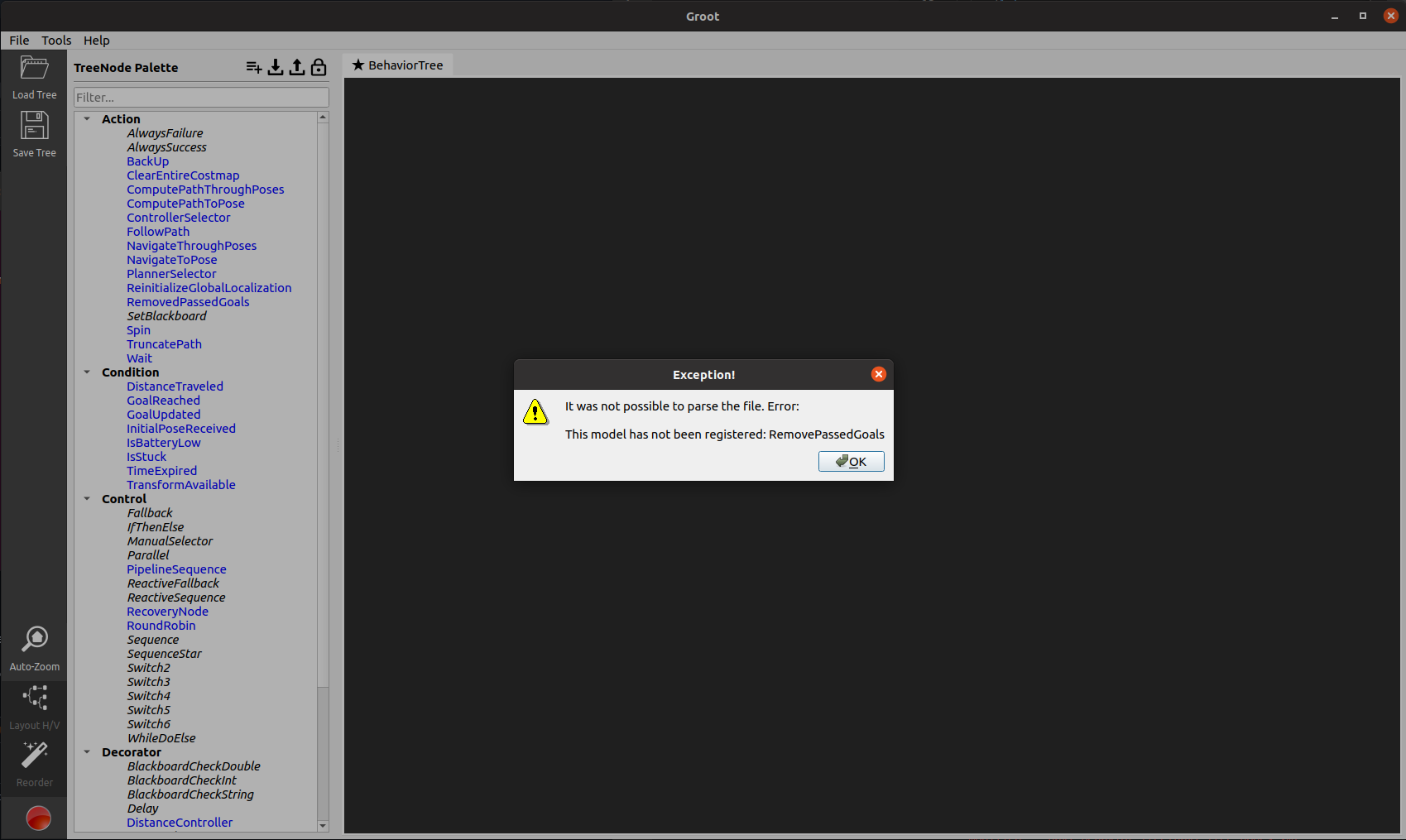 ``` It was not possible to parse the file. Error: This model has not been registered: RemovePassedGoals ```
Bug report
Steps to reproduce issue
Expected behavior
The tree loads in groot
Actual behavior