This is the official implementation of our TNNLS paper:
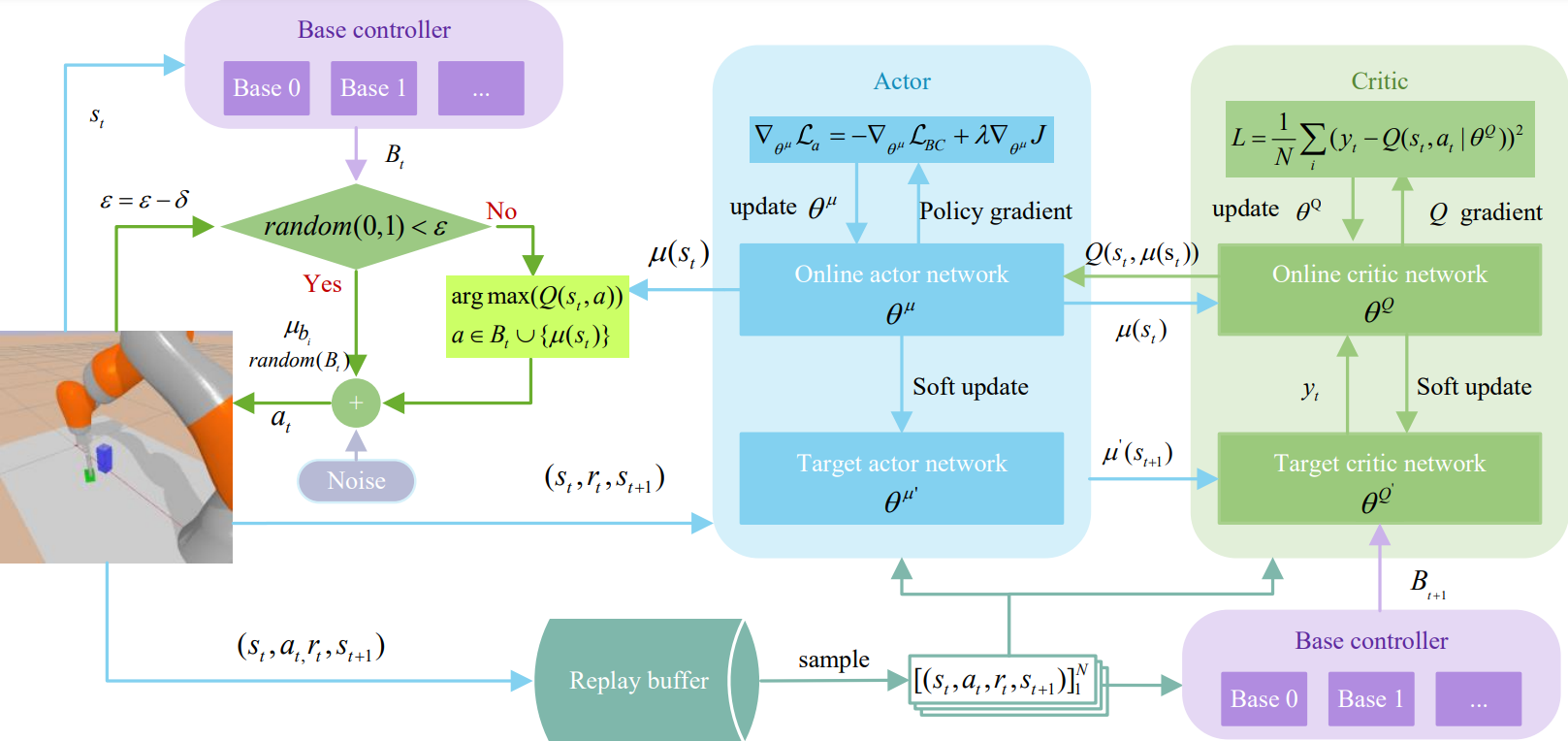
"Learning of Long-Horizon Sparse-Reward Robotic Manipulator Tasks with Base Controllers"
Guangming Wang, Minjian Xin, Wenhua Wu, Zhe Liu, and Hesheng Wang
- Python 3.6.9
- PyTorch 1.10.1
- CUDA 10.2
- pybullet
Train the complete algorithm with state-input. -t is the training task. -l is the saving log.
python learn.py -q -b -c -t 1 -l 1
Train the complete algorithm with image-input.
python learn.py -q -b -c -i
Train with ensemble Base Controllers.
python learn.py -q -b -c -e
Test the model in log -l of task -t.
python test.py -t 1 -l 1
plot the learning curve for a set of training.
python plot.py
If you find our work useful in your research, please cite:
@article{wang2022learning,
title={Learning of Long-Horizon Sparse-Reward Robotic Manipulator Tasks With Base Controllers},
author={Wang, Guangming and Xin, Minjian and Wu, Wenhua and Liu, Zhe and Wang, Hesheng},
journal={IEEE Transactions on Neural Networks and Learning Systems},
year={2022},
publisher={IEEE}
}