0% encontró este documento útil (0 votos)
118 vistas11 páginasMatemática en Sistemas de Control
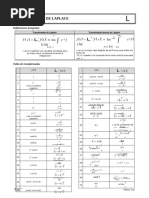
Este documento presenta conceptos matemáticos clave para sistemas de control, incluyendo transformadas de Laplace, variables y funciones complejas, teoremas de valor inicial y final, y métodos para resolver ecuaciones diferenciales lineales a través de la transformada de Laplace y su inversa. Explica cómo estas herramientas pueden usarse para convertir problemas de sistemas de control en ecuaciones algebraicas y determinar sus soluciones en el tiempo.
Cargado por
Carlos HuarcayaDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
0% encontró este documento útil (0 votos)
118 vistas11 páginasMatemática en Sistemas de Control
Este documento presenta conceptos matemáticos clave para sistemas de control, incluyendo transformadas de Laplace, variables y funciones complejas, teoremas de valor inicial y final, y métodos para resolver ecuaciones diferenciales lineales a través de la transformada de Laplace y su inversa. Explica cómo estas herramientas pueden usarse para convertir problemas de sistemas de control en ecuaciones algebraicas y determinar sus soluciones en el tiempo.
Cargado por
Carlos HuarcayaDerechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd